Abstrak
Saat ini robot bawah air banyak bermunculan, terlihat dari banyaknya industri maupun institusi yang mengembangkan robot bawah air ini. Mulai dari Underwater ROV (Remotely Operated Vehicle) sampai kepada AUV (Autonomous Underwater Vehicle). Robot-robot tersebut dibuat untuk beragam keperluan, seperti untuk kepentingan riset ilmiah, untuk tujuan komersil maupun untuk pertahanan militer. Program robot bawah air ini dimulai sejak tahun 1960 untuk keperluan explorasi bawah laut.
Banyak negara maju telah mendirikan departemen tersendiri untuk mengembangkan robot jenis ini. Di MIT (Massachusetts Institute of Technology) terdapat Bluefin Robotis, yang didirikan tahun 1989. Di California ada The Naval Postgraduate School. Bahkan di beberapa negara Eropa dan Australia sering diadakan kompetisi robot bawah air, seperti :
- AUVSI (Association for Unmanned Vehicle Systems International) melalui kompetisinya yang bernama IAUVC (International Autonomous Underwater Vehicle Competition).
- Australian Competition (Australia dan Asia Fasifik)
Kompetisi tersebut diantara mempertandingkan kemampuan robot untuk : bergerak mengikuti dinding, atau mengikuti pipa, atau mencari target dan object mapping. Yang paling menantang dalam pembuatan robot bawah air ini adalah penentuan system kontrol yang tepat, seperti menggerakkan aktuator untuk mencapai posisi yang diinginkan atau kecepatan dari robot itu sendiri, sebab aktuator tersebut akan berhubungan dengan sifat air yang dinamis.
Pada proyek robotika ini, hanya difokuskan pada robot ROV dimana robot bawah air tersebut dikendalikan oleh operator. Adapun beberapa hal yang dibahas pada artikel ini adalah :
Desain dan pengembangan ROV (mekanik dan elektrik)
Komunikasi serial (pengontrolan melalui RC / Komputer)
Penerapan sistem kontrol
Tahap pengerjaan :
0. Cari dana untuk beli semua komponen yang diperlukan. ^_^
(Ada yang mau mendanai gak?? hehehe… ^_^)
1. Cari waterproof actuator (motor DC)
2. Dapatkan desain yang tepat
3. Cari Power Supply yang tepat
4. Dapatkan kontol yang tepat untuk gerakan dalam air
5. Uji coba “dummy robot”
6. Pelajari komunikasi serial dan wireless
7. Tambahkan kamera pengintai mini (waterproof)
8. Mendesain user interface di komputer
9. Memuat Dokumentasi
10. Buat animasi Flash untuk presentasi
Work in progress :
# Cari Waterproof actuator
Maret 2008 sudah sudah nemu cara membuat fan komputer menjadi waterproof fan. Namun setelah dicoba di dalam air, powernya masih kurang.
Todo : Harus nyari lagi fan yang punya daya besar, atau coba ganti dengan motor DC atau servo.
# Dapatkan desain yang tepat
2 desain yang terpilih, yaitu desain ROV dari MIT dan dari Universitas Florida
Masih dipelajari.
# Kerjaan yang lain masih pending ^_^
Material dan Perkiraan Biaya
| NO | Material | Qty | Harga |
|---|---|---|---|
| 1 | Waterproof fan (fan komputer + waterproofing material) | 4 | 250.000 |
| 2 | Mini Spy Camera | 1 | 500.000 |
| 3 | Accu kering 12V/7A | 2 | 300.000 |
| 4 | Aluminium (untuk rangka robot) | 1 set |
|
| 5 | Mikrokontroler ATMega8 | 1 | 18.000 |
| 6 | Remote control / Wireless modul | 1 |
|
| 7 | IC L293D | 2 | 40.000 |
| 8 | Komponen pasif (Resistor, Capasitor, dll) | 1 Set | 10.000 |
| Total |
|
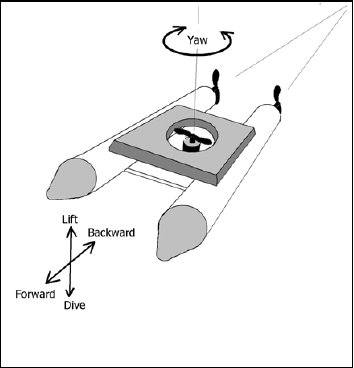
Beberapa faktor yang memberikan efek pada robot underwater
* Bouyancy
* Hydrodynamic Damping
* Coriolis
* Addes Mass
Desain / Konsep
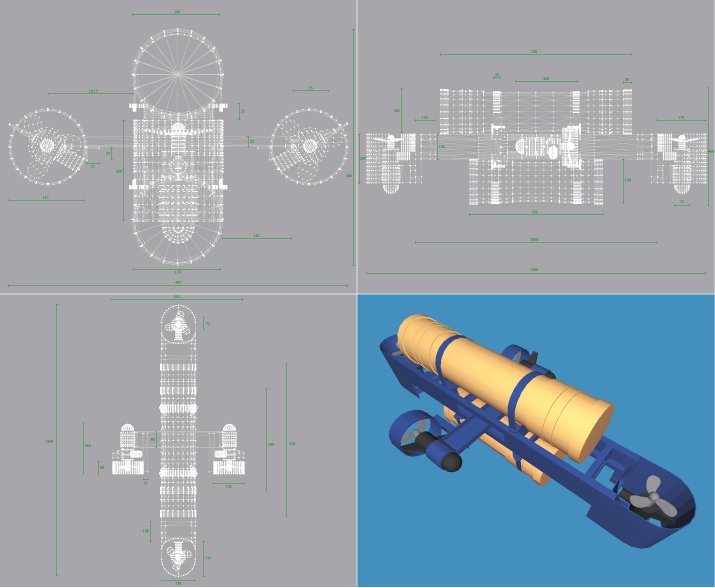
atau mungkin yang ini